On the incidence of a subspace and some vertex of the unit cube
A new heuristic polynomial time algorithm has been implemented in Python. The algorithm rejects almost all subspaces of a sufficiently small dimension that are not incident to any vertex of the multidimensional unit cube [1, 2]. Of course, the worst-case computational complexity of the recognition problem is very hard.
The input is a matrix \(L\) whose entries are coefficients of all linear forms \(\ell_j\) in the system of equations $$\left\{\begin{array}{rcl} x_0&=&1\\ x_j&=&\ell_j(x_0,\dots,x_s), j>s\\ x_i&\in&\{0,1\}\\ \end{array}\right.$$ The output is equal to
False, when there exists a (0, 1)-solution, i.e., the subspace does not pass through any vertex;True, when no obstacle is found.
Of course, True does not mean that a (0, 1)-solution exits.
Rows of the matrix \(L\) correspond to linear forms \(\ell_j\). For example, if there are two linear forms \(\ell_2=2x_0+x_1\) and \(\ell_3=3x_1\), then the matrix \(L\) is equal to $$L=\left(\begin{array}{cc} 2&1\\ 0&3\\ \end{array}\right)$$ The matrix \(L\) consists of variable coefficients of the system of equations.
Let us consider an example.
from fractions import Fraction
import numpy as np
from qualg import may_have_01solution
inputs = [
np.array([[1, 1]]),
np.array([[2, 1],
[0, 3]]),
]
inputs.append(inputs[0] * 10**20)
inputs.append(inputs[1] * Fraction(1, 7))
for matrix_ell in inputs:
print("Input:")
print(matrix_ell)
print("Result:")
if may_have_01solution(matrix_ell):
print("A (0,1)-solution *may* exist.")
else:
print("There is *no* (0,1)-solution.")
print()
Implementation: qualg.py
from fractions import Fraction
import numpy as np
def may_have_01solution(matrix_ell):
matrix_b = compose_b(matrix_ell)
rank_a, rank_b = rank_ab(matrix_b)
return rank_a != rank_b
def compose_b(matrix_ell):
s = matrix_ell.shape[1] - 1
n = matrix_ell.shape[0] + s
height = (s + 1) * (s + 2) // 2
dtype = matrix_ell.dtype
matrix_b = np.zeros(shape=(height, n + 1), dtype=dtype)
for i in range(s):
matrix_b[i + 1, i] = -1
matrix_b[(i + 1) * (2 * s - i + 2) // 2, i] = 1
looo = np.array([1] + s * [0], dtype=dtype)
triu_indices = np.triu_indices(s + 1)
for j in range(n - s):
matrix_q = matrix_ell[j] * (matrix_ell[j] - looo).reshape(-1, 1)
matrix_q += np.tril(matrix_q, -1).T
matrix_b[:, s + j] = matrix_q[triu_indices]
matrix_b[0, -1] = 1
return matrix_b
def rank_ab(matrix_b):
matrix = matrix_b + Fraction()
height, width = matrix.shape
a_rank = b_rank = 0
for column_index in range(width):
if b_rank == height:
break
submatrix = matrix[b_rank:, column_index:]
first_column = submatrix[:, 0]
nonzero_indices = first_column.nonzero()[0]
if nonzero_indices.size == 0:
continue
if first_column[0] == 0:
first_nonzero = nonzero_indices[0]
first_row_copy = submatrix[0].copy()
submatrix[0] = submatrix[first_nonzero]
submatrix[first_nonzero] = first_row_copy
for row in range(1, height - b_rank):
if first_column[row] != 0:
ratio = first_column[row] / first_column[0]
submatrix[row] -= ratio * submatrix[0]
a_rank += column_index < width - 1
b_rank += 1
return a_rank, b_rank
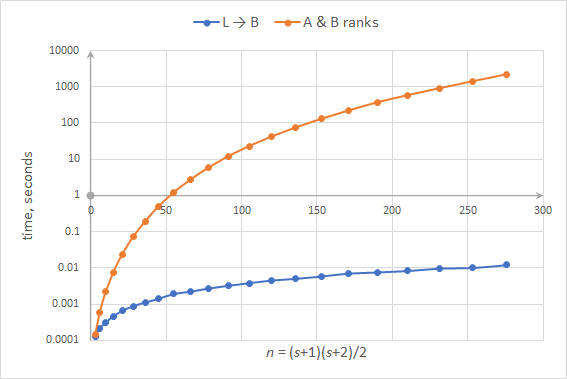
The running time of the algorithm
There are illustrations that give an overview of the running time of the algorithm. Time was estimated using matrices \(L\) with random integer entries uniformly distributed in the segment \([-10^9,10^9]\) (unless otherwise stated). The calculations were made using a personal computer (Core i5-3570 CPU, 16 GB of RAM).
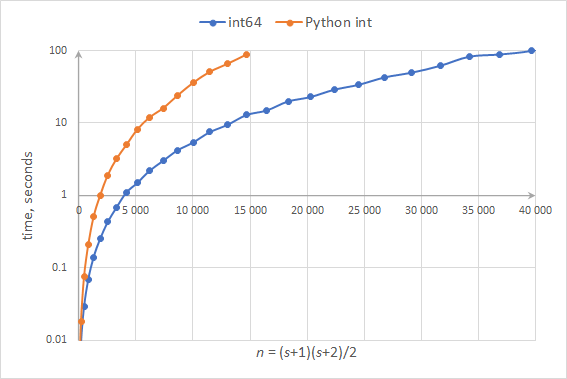
The running time of the algorithm is almost completely determined by the time of exact calculation of the matrix rank.
The faster implementation to calculate the rank, the higher dimension of problems that can be solved.
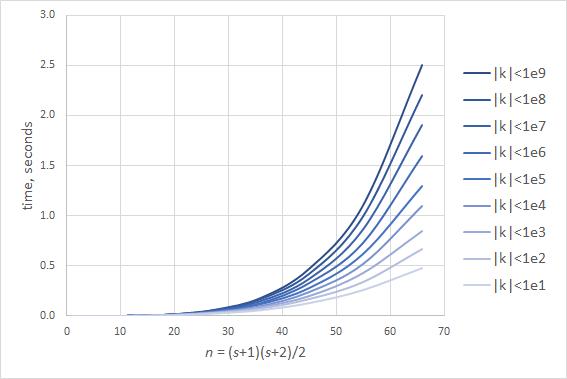
The running time of the algorithm essentially depends on the maximum absolute value of the matrix entries received as the input.
References
- A.V. Seliverstov. Binary solutions to large systems of linear equations. Prikladnaya Diskretnaya Matematika, 2021, no. 52, pp. 5–15. (in Russian) DOI: 10.17223/20710410/52/1
- O.A. Zverkov, A.V. Seliverstov. Effective lower bounds on the matrix rank and their applications. Programming and Computer Software, 2023, Vol. 49, No. 5, P. 441–447. DOI: 10.1134/S0361768823020160